Obtain Rotation Axis from Rotation Matrix and translation vector in OpenCV
Solution 1
For every type of conversion between rotation representations you have this website euclidean space.
You will find theory and code samples of:
Rotation matrix to quaternion: link
Quaternion to axis angle: link
Rotations in general and all representations: link
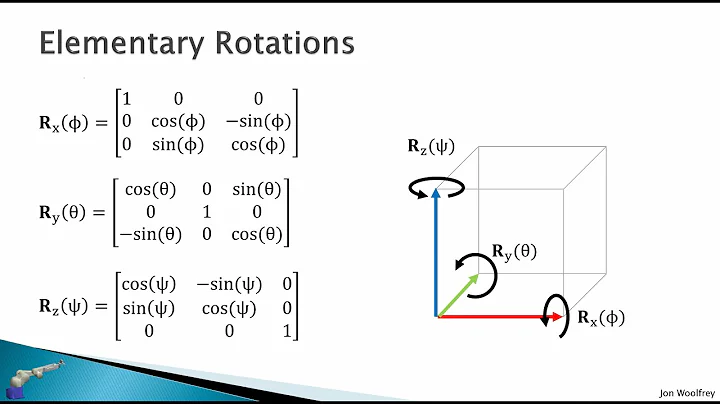
And in relation to your question you have Axis Angle. If you have the rotation matrix R (3x3), you can obtain the angle and axis this way (see Matrix to Axis Angle):
angle = acos(( R00 + R11 + R22 - 1)/2);-
Axis x,y,x:
x = (R21 - R12)/sqrt((R21 - R12)^2+(R02 - R20)^2+(R10 - R01)^2);
y = (R02 - R20)/sqrt((R21 - R12)^2+(R02 - R20)^2+(R10 - R01)^2);
z = (R10 - R01)/sqrt((R21 - R12)^2+(R02 - R20)^2+(R10 - R01)^2);
Solution 2
Already working wih openCV I would rcommend using the Rodrigues method: cv::Rodrigues(src, dst, jacobian), that computes the rotation vector if you have a rotation matrix for an argument and vice versa.
Related videos on Youtube
 20 : 05
20 : 05
 22 : 01
22 : 01
 11 : 14
11 : 14
 00 : 10
00 : 10
 06 : 46
06 : 46
 13 : 16
13 : 16
 12 : 10
12 : 10
 22 : 23
22 : 23
aranga
Updated on July 07, 2022Comments
-
aranga almost 2 years
I have a chessboard in two images with some angle of rotation. Lets find the rotation angle of second image with reference of first image.
For that I found the Rotation Matrix (3x3) and translation matrix (3x1) of those objects.
How can I find the Rotation Angle and Rotation Axis of object using those matrices?
-
aranga over 11 yearsHi..jav i have a another one question.my object was placed parallel to a wheel.when the wheel is moving,my object also moved using the rotation matrix i was calculated the angle and rotation axis.Now the question is,how to calculate the rotation angle of the wheel center or spindle.i47.tinypic.com/344vck6.jpg
{kind=link}