Proper Trigonometry For Rotating A Point Around The Origin
22,210
Solution 1
It depends on how you define angle. If it is measured counterclockwise (which is the mathematical convention) then the correct rotation is your first one:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
But if it is measured clockwise, then the second is correct:
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
Solution 2
To carry out a rotation using matrices the point (x, y) to be rotated is written as a vector, then multiplied by a matrix calculated from the angle, θ, like so:

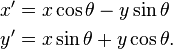
where (x′, y′) are the co-ordinates of the point after rotation, and the formulae for x′ and y′ can be seen to be
Solution 3
This is extracted from my own vector library..
//----------------------------------------------------------------------------------
// Returns clockwise-rotated vector, using given angle and centered at vector
//----------------------------------------------------------------------------------
CVector2D CVector2D::RotateVector(float fThetaRadian, const CVector2D& vector) const
{
// Basically still similar operation with rotation on origin
// except we treat given rotation center (vector) as our origin now
float fNewX = this->X - vector.X;
float fNewY = this->Y - vector.Y;
CVector2D vectorRes( cosf(fThetaRadian)* fNewX - sinf(fThetaRadian)* fNewY,
sinf(fThetaRadian)* fNewX + cosf(fThetaRadian)* fNewY);
vectorRes += vector;
return vectorRes;
}
Author by
Joshua
Updated on July 26, 2022Comments
-
Joshua almost 2 years
Do either of the below approaches use the correct mathematics for rotating a point? If so, which one is correct?
POINT rotate_point(float cx,float cy,float angle,POINT p) { float s = sin(angle); float c = cos(angle); // translate point back to origin: p.x -= cx; p.y -= cy; // Which One Is Correct: // This? float xnew = p.x * c - p.y * s; float ynew = p.x * s + p.y * c; // Or This? float xnew = p.x * c + p.y * s; float ynew = -p.x * s + p.y * c; // translate point back: p.x = xnew + cx; p.y = ynew + cy; } -
Justin Ardini almost 14 yearsYou could save the
cosfandsinfresults to variables to use half as many trig function calls. :) -
Daniel Bingham over 6 yearsDon't forget, that if you're working in a typical screen coordinate space that your y axis will be inverted from the mathematical standard (down is +y, up is -y) and you'll need to account for that.